


Robota remote gubernata magis et magis opus in casibus extremis suscipiunt, ut in investigatione superstitum aedificiorum collapsorum.

Detectio materiarum potentialiter periculosarum, casus obsidum, vel aliae mensurae ad legem exsequendam et contra terrorismum. Haec instrumenta specialia ad operationem remotam micromotores altae praecisionis loco operariorum humanorum adhibent ad necessarias operationes periculosas peragendas, quae periculum hominibus implicatis insigniter minuere possunt. Tractatio accurata et accurata instrumentorum tractatio duae sunt condiciones necessariae magni momenti.
Cum technologia pergit evolvere et melior fieri, robota ad opera difficiliora et complexiora adhiberi possunt. Quam ob rem, robota nunc magis magisque in casibus extremis, quae hominibus nimis periculosa sunt, adhibentur – velut in operationibus industrialibus, in custodiendis legibus, vel in mensuris contra terrorismum, ut in identificandis obiectis suspectis vel in deactivandis bombis. Ob tales condiciones extremas, haec vehicula manipulatoria quam compactissima esse debent ut requisitis specificis satisfaciant. Brachia eorum prehensiva motus flexibiles permittere debent, simul praecisionem et vim demonstrantes quae ad varia opera tractanda necessariae sunt. Consumptio energiae etiam partes magnas agit: quo efficacior impulsio, eo longior vita pilae. Micromotores speciales altae efficaciae pars magna campi robotorum telemoderatorum facti sunt, talibus necessitatibus perfecte satisfaciunt.
Hoc etiam ad robotas exploratores compactiores pertinet.

Quae cameris instructae sunt et interdum etiam directe in locum usus iaciuntur, itaque ictus, alias vibrationes et pulverem vel calorem in locis periculosioribus sustinere debent. Hoc in casu, nullus homo directe ad laborem ire potest ad superstites quaerendos. Ugvs (vehicula terrestria sine auriga) hoc ipsum facere possunt. Et, gratia micromotori FAULHABER DC, cum reductore planetario qui momentum auget coniuncto, maxime certa sunt. Magnitudo minima UGVs permittit investigationes sine periculo aedificiorum collapsorum et imagines in tempore reali mittit, ea instrumentum magni momenti ad decisiones capiendas pro respondentibus in casibus urgentibus cum de responsis tacticis agitur.
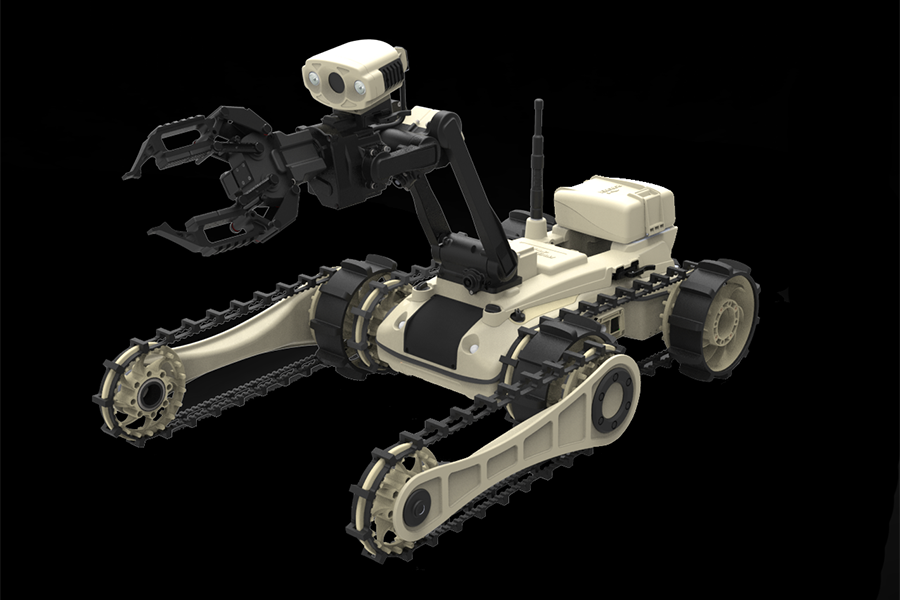
Motor et dentes DC praecisionis ex instrumento compacto facti, apti ad varia officia gubernandi. Hi roboti robusti, fideles et vilis pretii sunt.
Hodie, robota mobilia vulgo adhibentur in condicionibus criticis ubi periculum magnum hominibus est et in partibus operationum industrialium.

Mensurae ad legem exsequendam vel ad terrorismum prohibendum, ut puta res suspectas identificandas vel bombas exarmandas. In his casibus extremis, hi "operatores vehiculorum" necessitatibus specificis satisfaciunt. Duae sunt condiciones fundamentales ad accuratam manipulationem et accuratam instrumentorum tractationem. Scilicet, instrumentum etiam quam minimum esse debet ut per angustos meatus transeat. Scilicet, actuatores a talibus robotis adhibiti satis insignes sunt. Micromotores speciales altae efficacitatis pars magni momenti facti sunt.

Hoc dicto, triginta chiliogrammata ad extremitatem brachii tollere iam satis difficile est.
Simul, opera specifica praecisionem potius quam vim brutam requirunt. Accedit quod spatium pro brachio valde angustum est. Ergo, actuatores leves et compacti pro prensoribus necessarii sunt. Ut his requisitis difficilibus satisfaciamus, cura ut prensor trecentos sexaginta gradus rotari possit, dum necessaria praecisione et facultate ad varia opera tractanda praesto sint.
Consumptio energiae etiam momentum magnum agit cum machinis a batteria utuntur. Quo maior efficientia transmissionis, eo longior tempus servitii. "Quaestio impulsionis" solvitur utens micromotore DC cum rotis planetariis et frenis. Motor seriei 3557 usque ad 26w cum tensione nominali 6-48v currere potest, et una cum rotis praefixis seriei 38/2, vim impulsivam ad 10Nm augere possunt. Rotae omnes metallicae non solum robustae sunt, sed etiam insensibiles oneri culminanti transitoriis. Rationes retardationis eligi possunt a 3.7:1 ad 1526:1. Rota motoris compacta arcte in regione superiore manipulatoris collocanda est. Frenatio integrata positionem finalem in casu defectus energiae praestat. Praeterea, partes compactae facile conservantur, et partes fractae celeriter substitui possunt. Aliud commodum magnum: Motores DC potentes penicillo instructi tantum simplicia moderamina limitantia currentis requirunt. Responsio roboris currentis ad vectem moderationis remotae per pressionem retrorsum applicatur, operatori sensum vis dans ad prehensorem vel "carpum" applicandum. Compacta machina impulsoria ex accurato motore DC et mechanismo adaptatorio constat. Variis operibus impulsoriis apta. Sunt potentes, fideles et vili pretio. Simplex operatio machinae partis ordinariae requisitis vilitatis, celeritatis et fidelitatis satisfacit.