

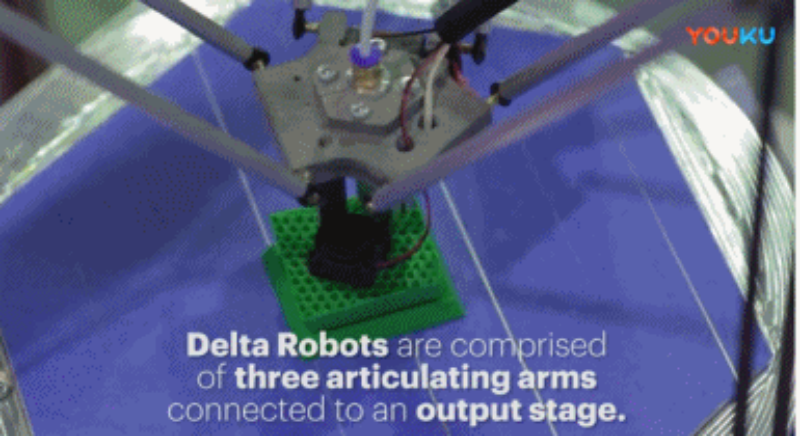
Secundum nuntios mediorum externorum, robotus Delta late in linea compositionis adhiberi potest propter celeritatem et flexibilitatem, sed hoc genus operis multum spatii requirit. Et nuperrime, ingeniarii ex Universitate Harvardiana minimam versionem brachii robotici in mundo, MilliDelta appellatam, excogitaverunt. Ut nomen indicat, Millium+Delta, sive Delta minima, paucis tantum millimetris longum est et selectionem, involucrum, et fabricationem accuratam permittit, etiam in quibusdam processibus minimaliter invasivis.
Anno MMXI, turma apud Institutum Wyssyan Universitatis Harvardianae artem fabricationis planae pro microrobotis elaboravit, quam fabricationem systematis microelectromechanici emergentis (MEMS) appellaverunt. Per annos proximos, investigatores hanc ideam in actum deduxerunt, robotem repentem se ipsum componentem et robotem apis agilem nomine Robobee creantes. Recentissimum MilliDelct etiam hac technologia utens constructum est.
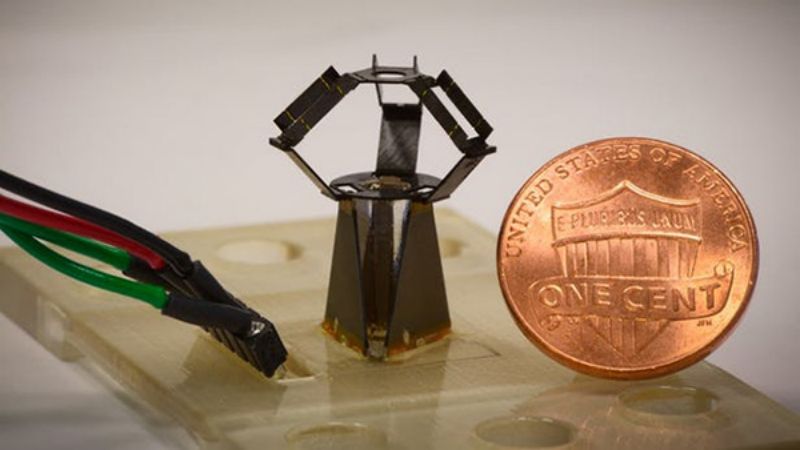
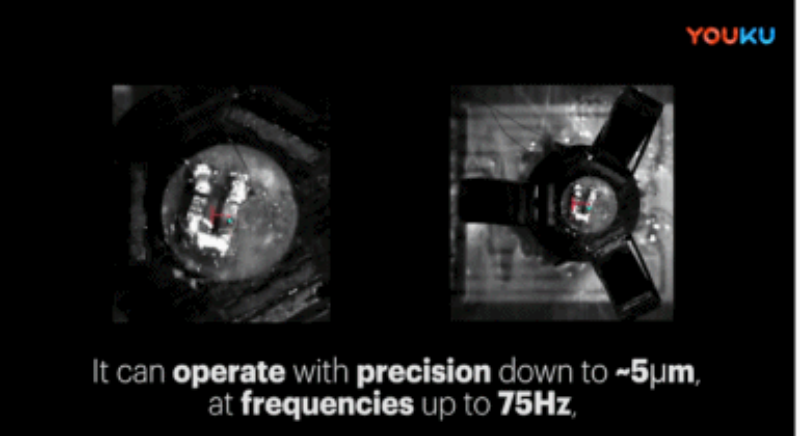
MilliDelta ex structura composita laminata et multis iuncturis flexibilibus constat, et praeterquam quod eandem dexteritatem ac robotus Delta plenae magnitudinis assequitur, in spatio tam parvo quam 7 millimetrorum cubicorum cum accuratione 5 micrometrorum operari potest. MilliDelta ipsa tantum 15 x 15 x 20 mm est.
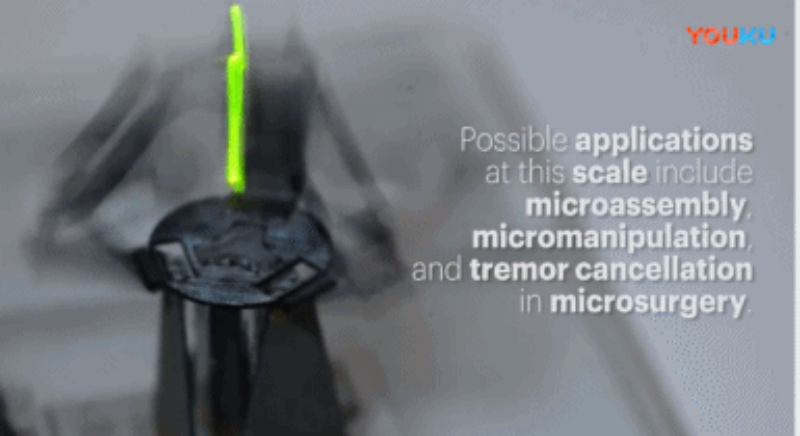
Parvum bracchium roboticum varias applicationes maiorum fratrum suorum imitari posset, usum inveniens in colligendis et convasandis rebus minutis, ut partibus electronicis in laboratorio, batteriebus, vel quasi manu stabili in microchirurgia fungens. MilliDelta primam chirurgiam perfecit, participans in probatione instrumenti ad primum tremorem humanum tractandum.
Relatio investigationis pertinentis in periodico "Science Robotics" divulgata est.
Tempus publicationis: XV Septembris, MMXXIII