

Differentia 1 effectus motoris: celeritas/momentum/magnitudo
Omnia genera motorum in mundo sunt. Motor magnus et motor parvus. Motor qui huc illuc movetur potius quam rotatur. Motor qui primo aspectu non apparet cur tam carum sit. Attamen omnes motores ob causam eliguntur. Qualem igitur motorem, qualem efficaciam, aut proprietates motor tuus idealis habere debet?
Huius seriei propositum est scientiam praebere quomodo motorem idealem eligere. Speramus eam utilem fore cum motorem eligis. Et speramus eam hominibus adiuturam esse ut fundamenta motorum discant.
Discrepantiae perfunctionis explicandae in duas partes distinctas dividentur, ut sequitur:
Celeritas/Momentum Motorium/Magnitudo/Pretium ← Res quas in hoc capitulo tractabimus
Celeritas, accuratio/levitas/vita et sustentabilitas/pulveris generatio/efficacia/calor
Generatio energiae/vibratio et strepitus/contramensurae exhaustorum/ambitus usus
1. Exspectationes de motore: motus rotationis
Motor plerumque ad motorem refertur qui energiam mechanicam ex energia electrica accipit, et plerumque ad motorem refertur qui motum rotationalem obtinet. (Est etiam motor linearis qui motum rectum obtinet, sed hoc tempore omittemus.)
Ergo, qualem rotationem vis? Visne eam potenter rotari sicut terebra, an debiliter sed magna celeritate sicut ventilabrum electricum? Intendendo ad differentiam motus rotationis desiderati, duae proprietates celeritatis rotationis et momenti torquendi magni momenti fiunt.
2. Momentum torquens
Momentum torquens est vis rotationis. Unitas momenti torquens est N·m, sed in motoribus parvis, mN·m vulgo adhibetur.
Motor variis modis designatus est ad momentum rotatorium augendum. Quo plures vices fili electromagnetici, eo maior momentum rotatorium.
Quia numerus convolutionum a magnitudine spirae fixa limitatur, filum smaltatum cum diametro fili maiori adhibetur.
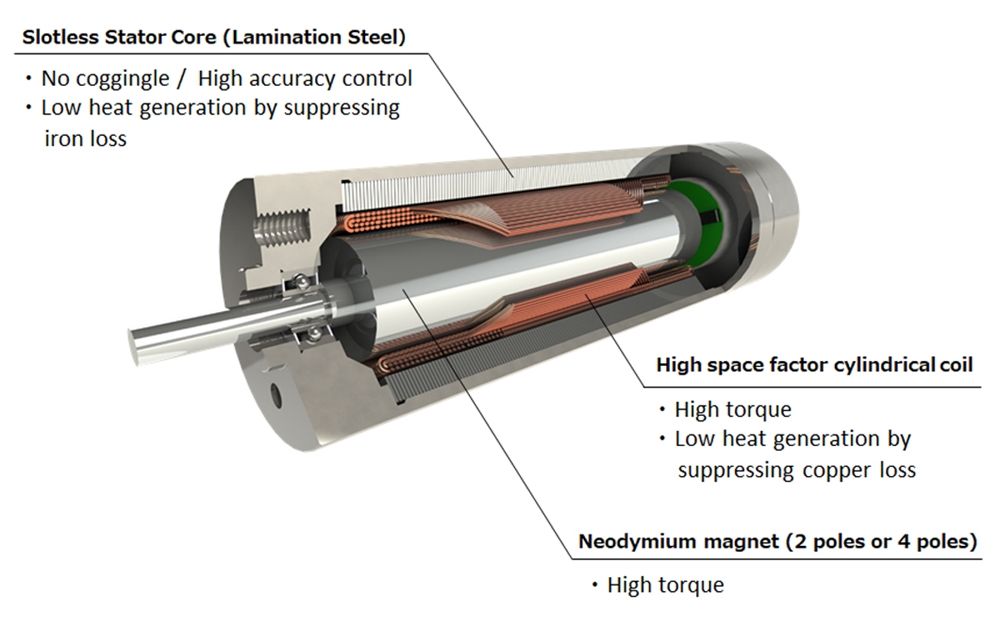
Series nostra motorum sine spazzolis (TEC) cum diametris 16 mm, 20 mm et 22 mm necnon 24 mm, 28 mm, 36 mm, 42 mm, octo generibus diametro externo 60 mm praesto est. Cum magnitudo spirae etiam cum diametro motoris crescat, momentum torquens maior obtineri potest.
Magneta valida adhibentur ad magna momenta torquendi generanda sine mutatione magnitudinis motoris. Magneta neodymii sunt potentissima magneta permanentia, deinde magneta samarii-cobalti. Attamen, etiam si tantum magneta valida uteris, vis magnetica ex motore effluet, et vis magnetica effluens ad momentum torquendi non confert.
Ut valido magnetismo plene utatur, tenuis materia functionalis, quae lamina chalybis electromagnetica appellatur, laminatur ad circuitum magneticum optimizandum.
Praeterea, quia vis magnetica magnetum samarii cobalti stabilis est mutationibus temperaturae, usus magnetum samarii cobalti stabilem motorem impellere potest in ambitu cum magnis mutationibus temperaturae vel temperaturis altis.
3. Celeritas (revolutiones)
Numerus revolutionum motoris saepe "celeritas" appellatur. Est effectus quoties motor per unitatem temporis rotatur. Quamquam "rpm" vulgo ut revolutiones per minutum adhibetur, etiam ut "min-1" in systemate unitatum SI exprimitur.
Comparatum cum momento torquendi, augere numerum revolutionum non est difficile technice. Simpliciter numerum rotarum in bobina minue ut numerus rotarum augeatur. Attamen, cum momentum torquendi decrescat cum numerus rotarum crescit, interest ut et momentum torquendi et rotationis requisita impleantur.
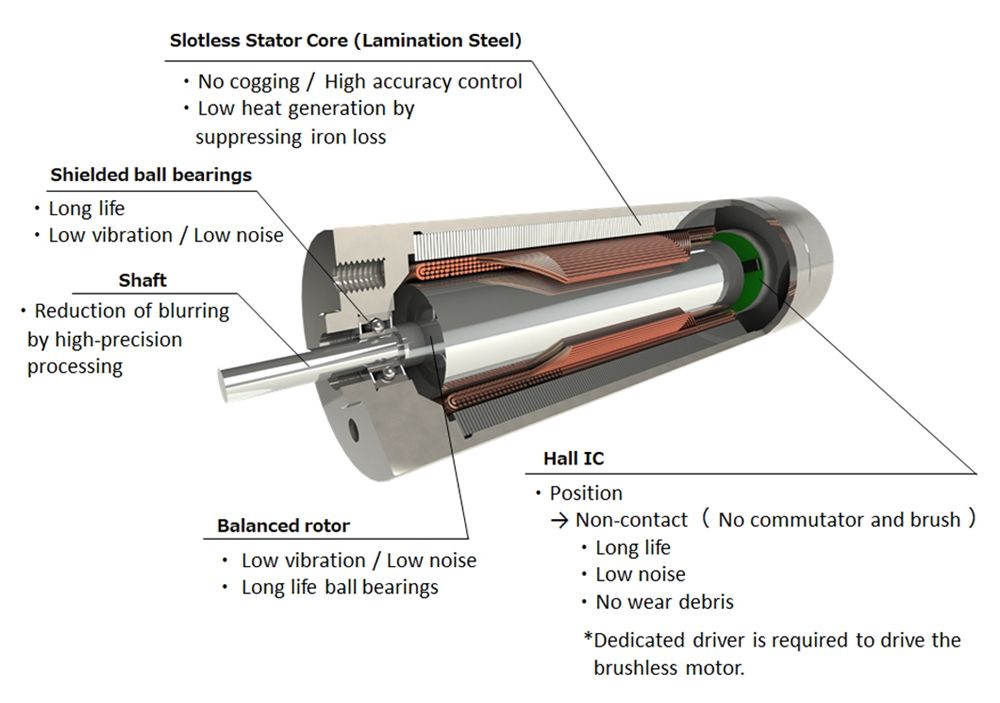
Praeterea, si magna celeritate utitur, optimum est sphaerulas potius quam planas adhibere. Quo maior celeritas, eo maior resistentiae frictionis iactura, eo brevior vita motoris.
Pro accurata axis deformatione, quo maior celeritas, eo maiores difficultates cum strepitu et vibratione ortae sunt. Quia motor sine spazzolis neque spazzolam neque commutatorem habet, minorem strepitum et vibrationem producit quam motor cum spazzolis (qui spazzolam cum commutatore rotante in contactum ponit).
Gradus III: Magnitudo
Cum ad motorem idealem ventum est, magnitudo motoris etiam inter factores magni momenti perfunctionis est. Etiam si celeritas (revolutiones) et momentum torquens sufficiunt, frustra est si in producto finali installari non potest.
Si celeritatem tantum augere vis, numerum gyrorum fili minuere potes, etiam si numerus gyrorum parvus est, sed nisi momentum torquens minimum adsit, non rotabitur. Quapropter, necesse est vias invenire ad momentum torquens augendum.
Praeter usum magnetium fortium supra memoratorum, etiam magni momenti est factorem cycli officii convolutionis augere. De numero convolutionum filorum minuendo iam locuti sumus ut numerus revolutionum conservetur, sed hoc non significat filum laxe convolutum esse.
Filis crassis utendo loco numeri spirarum minuendi, magnae copiae currentis fluere possunt et magnum momentum torquens etiam eadem celeritate obtineri potest. Coefficiens spatialis indicat quam arcte filum convolutum sit. Sive numerus spirarum tenuium augetur sive numerus spirarum crassarum minuitur, factor magni momenti est in momento torquendi obtinendo.
In genere, vis motoris a duobus factoribus pendet: ferro (magnete) et cupro (convolutione).
Tempus publicationis: XXI Iulii, MMXXIII